Overview:
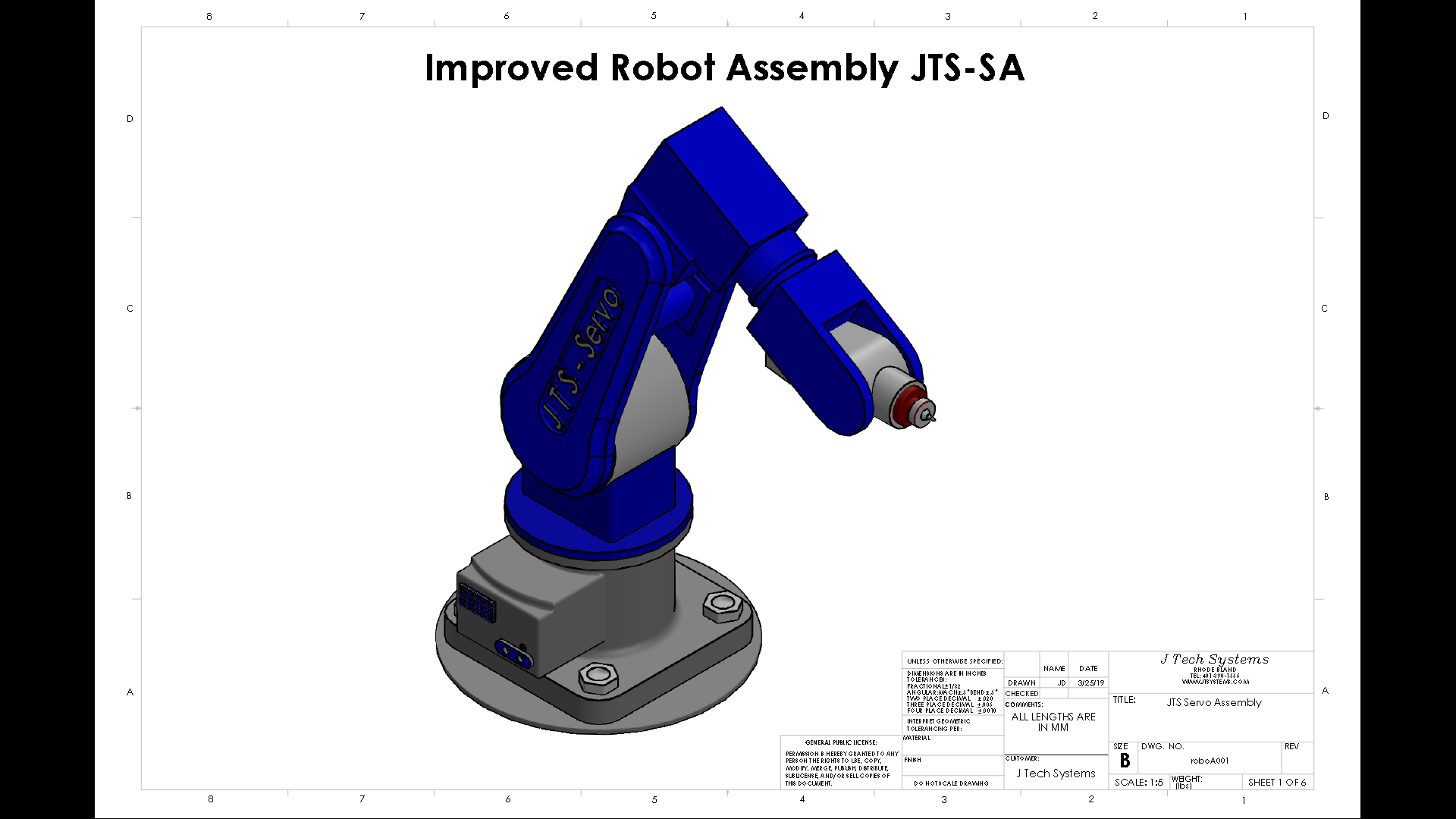
This is a design project which performs a simple kinematics simulation of the Improved Robot Assembly. The robot was created and assembled in SOLIDWORKS while the MATLAB GUI program was generated by MATLAB. The Improved Robot Assembly is the second version to the Simple Robot Assembly. Various design constraints such as the number of parts and weight were considered and removed. There are three parts to this project; the MATLAB GUI program which could potentially drive the Improved Robot, drawings of the Improved Robot Assembly and the Simple Robot Assembly.
Software and Programming Languages Used:
- MATLAB 2018
- SOLIDWORKS 2018
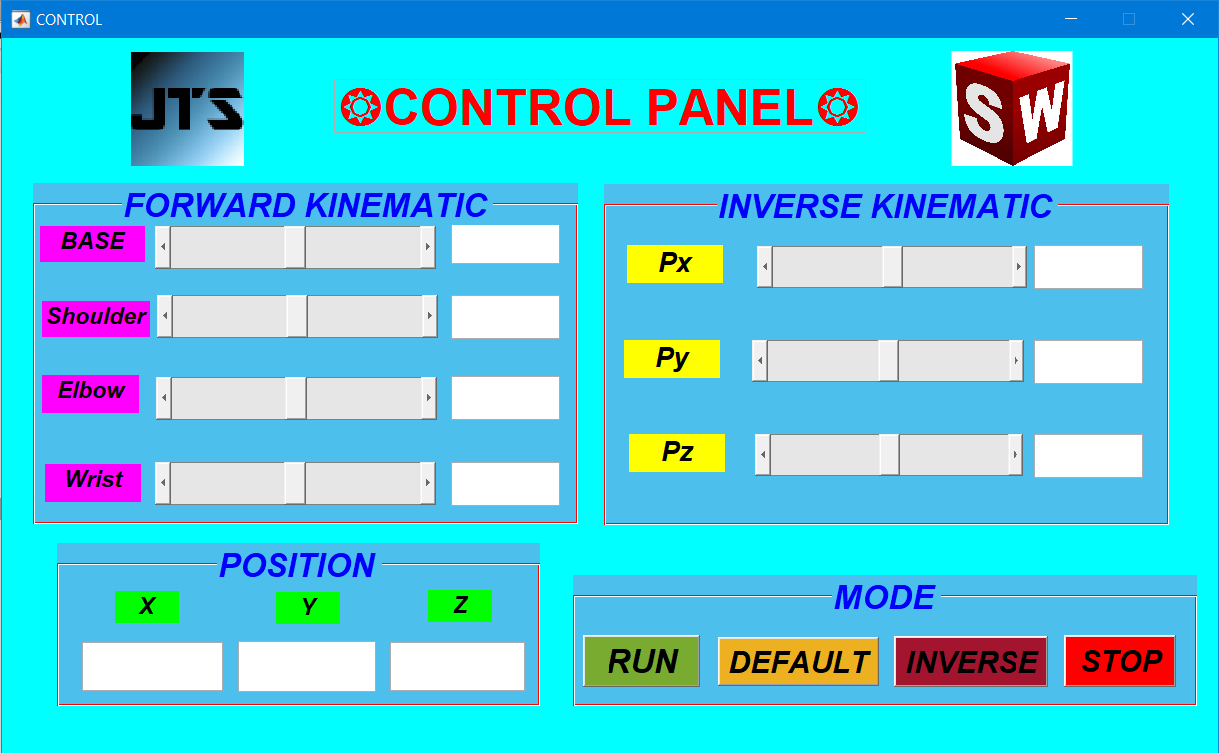
A GUI, or Graphic User Interface, was created and used in the MATLAB program to potentially control the robot's 6 degrees of freedom.